tlewis3348
Mechanical
- Aug 23, 2017
- 31
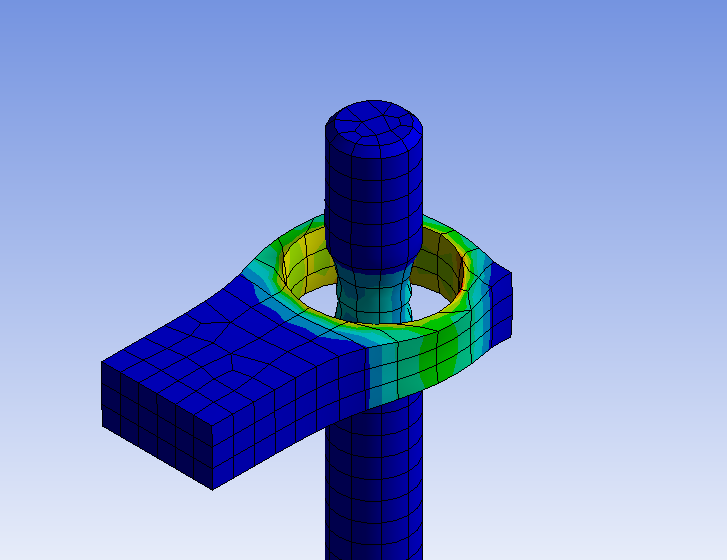
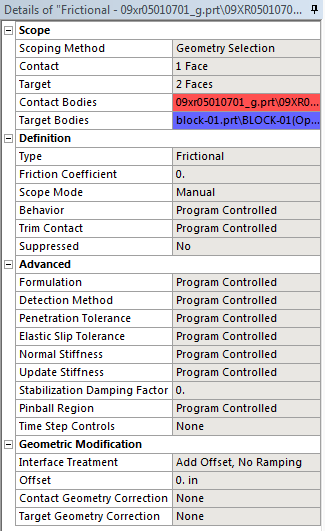
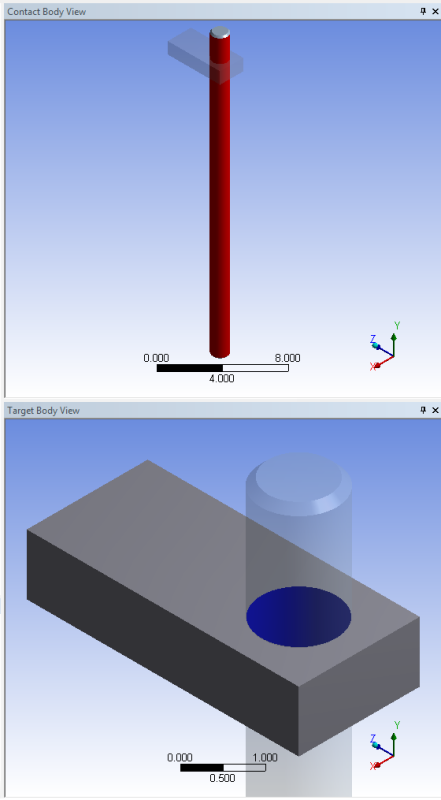
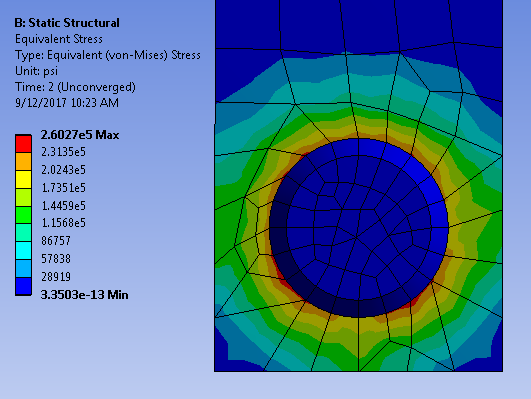
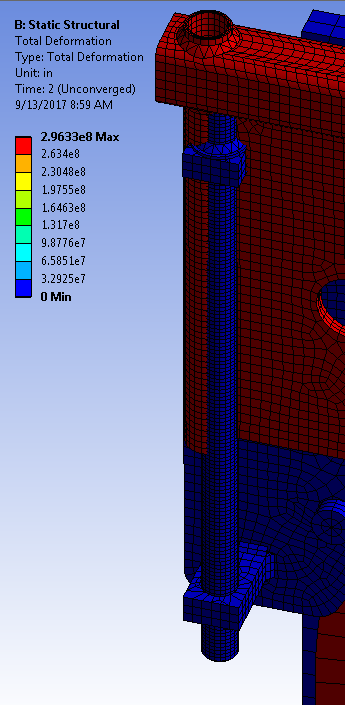
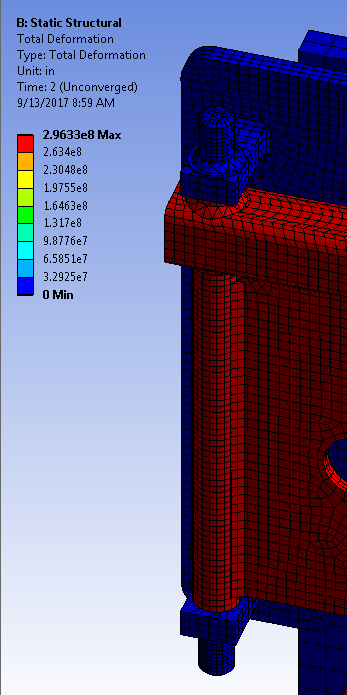
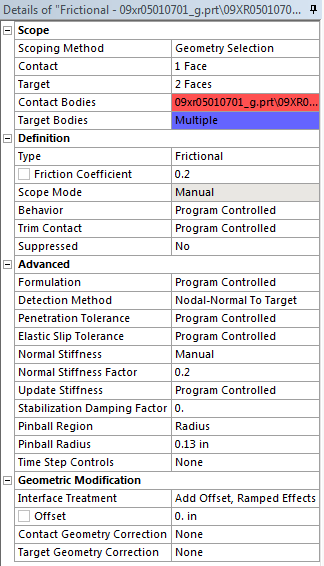
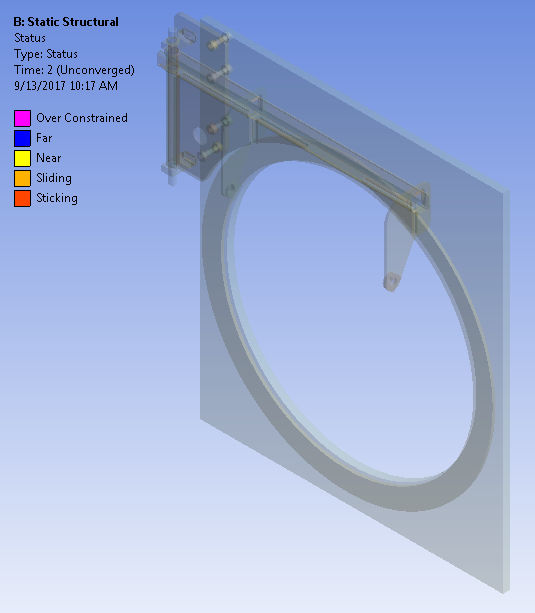
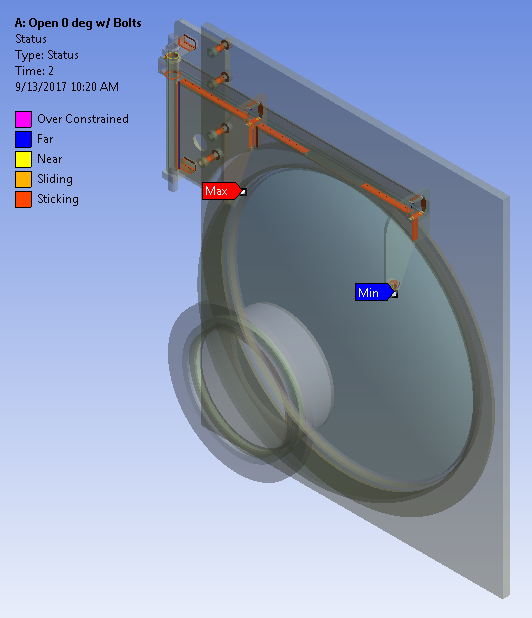
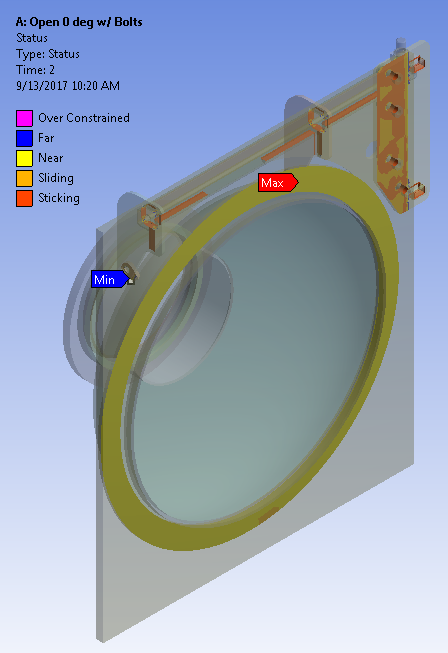
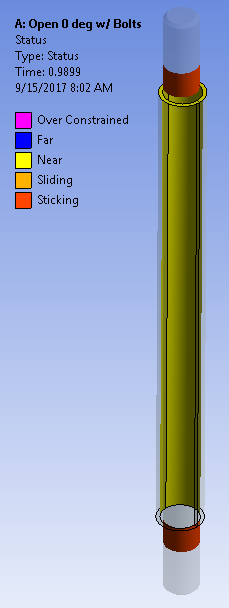
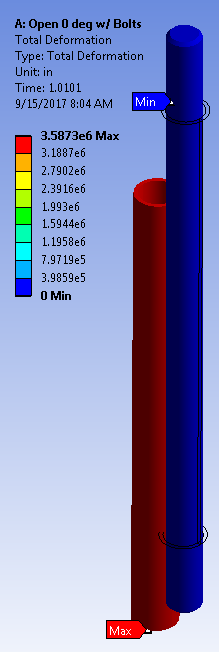
The attached file contains a project with two simulations. The first models a bolt uses frictional contact exclusively to restrain its motion. The second uses the same geometry and replaces the contact that would be between the shaft of the bolt and the clearance hole with a revolute joint. The difference in the two simulations is significant. The first captures the fact that the two plates are going to slide with respect to each other and eventually begin applying a shearing load to the shaft of the bolt. The second does not capture this behavior and makes it seem that the two plates will not slide with respect to each other.
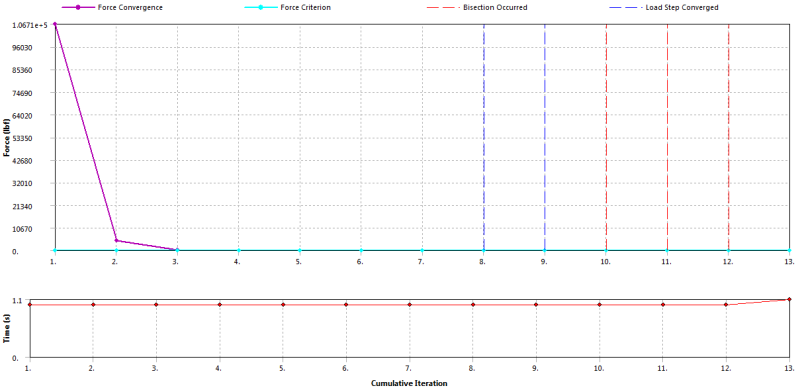
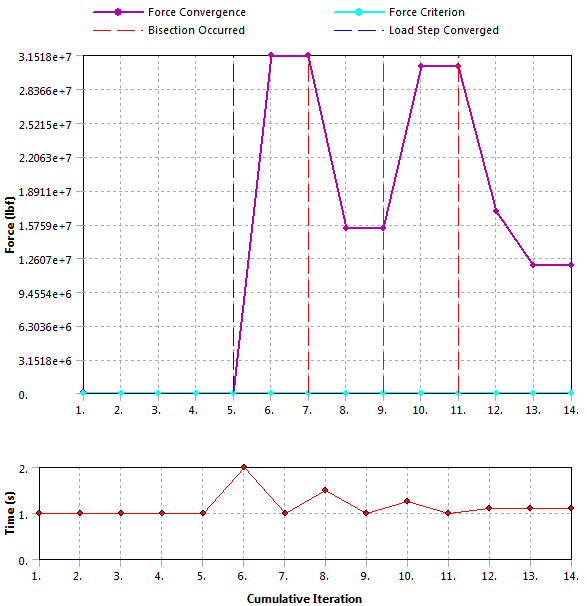
My question is whether this is an inescapable result of the nature of a revolute joint, or if there is a way to capture the sliding behavior of the two plates with a revolute joint. Furthermore, if the applied load is more than 3702 lbs (which is what I have it set at currently), the plates come into contact with the bolt, the simulation takes far longer, and warnings and errors are thrown when it does finally finish.
In a small and simple simulation like this, it isn't that big of a deal, but in a larger simulation, these issues can make the model run for much longer than I have time to let it run. Furthermore, when the simulation does finally finish, it will often tell me that it didn't converge and the results can't be trusted. Is there a better way to model a bolt like this that is at risk of being sheared off?
My question is whether this is an inescapable result of the nature of a revolute joint, or if there is a way to capture the sliding behavior of the two plates with a revolute joint. Furthermore, if the applied load is more than 3702 lbs (which is what I have it set at currently), the plates come into contact with the bolt, the simulation takes far longer, and warnings and errors are thrown when it does finally finish.
In a small and simple simulation like this, it isn't that big of a deal, but in a larger simulation, these issues can make the model run for much longer than I have time to let it run. Furthermore, when the simulation does finally finish, it will often tell me that it didn't converge and the results can't be trusted. Is there a better way to model a bolt like this that is at risk of being sheared off?