matty90
New member
- Jul 23, 2021
- 7
Hello everyone!
This is my first post in this forum so I hope I'm not breaking any rules!
I have already read some threads on this kind of problem but somehow I couldn't find what I was looking for.
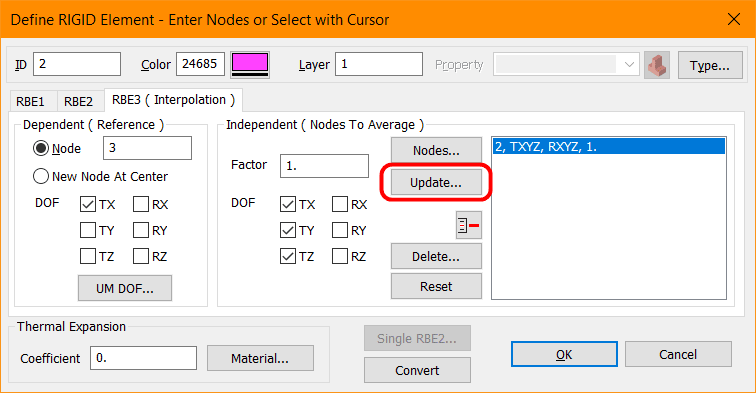
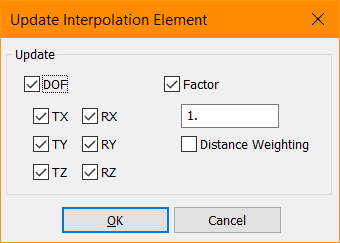
I have decided to use RBE3 to apply some loads to a beam. Singularity fatal error does occur, though I think I have selected the "right" DOFs in both the dependent and independent terms of the RBE3. In fact, all translations that define rigid body motion have been activated on the independent node, as well as all possible DOFs related to moments that should develop.
The model is attached to this post. It is a cantilever beam loaded on its tip using the RBE3.
Thank you in advance for your attention. This forum has provided me some insights quite some times.
Greetings!
This is my first post in this forum so I hope I'm not breaking any rules!
I have already read some threads on this kind of problem but somehow I couldn't find what I was looking for.
I have decided to use RBE3 to apply some loads to a beam. Singularity fatal error does occur, though I think I have selected the "right" DOFs in both the dependent and independent terms of the RBE3. In fact, all translations that define rigid body motion have been activated on the independent node, as well as all possible DOFs related to moments that should develop.
The model is attached to this post. It is a cantilever beam loaded on its tip using the RBE3.
Thank you in advance for your attention. This forum has provided me some insights quite some times.
Greetings!