rollingcloud
Aerospace
- Aug 9, 2022
- 174
This was done by someone who I cannot reach out and ask. I am trying to make sense of his measurement drawing, it's not easy since I am a noob as well...
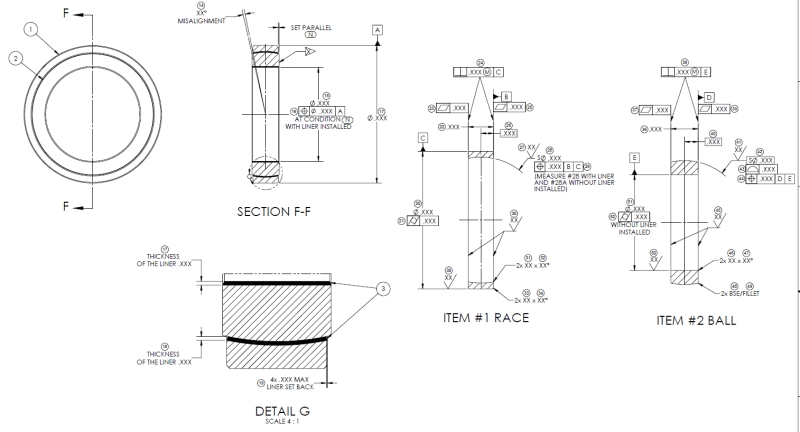
It has 3 axes as datums A, C and E, I am pretty sure that's not correct, one axis (datum C) should be enough IMO.
Also, none of the TP callouts have basic dimension.
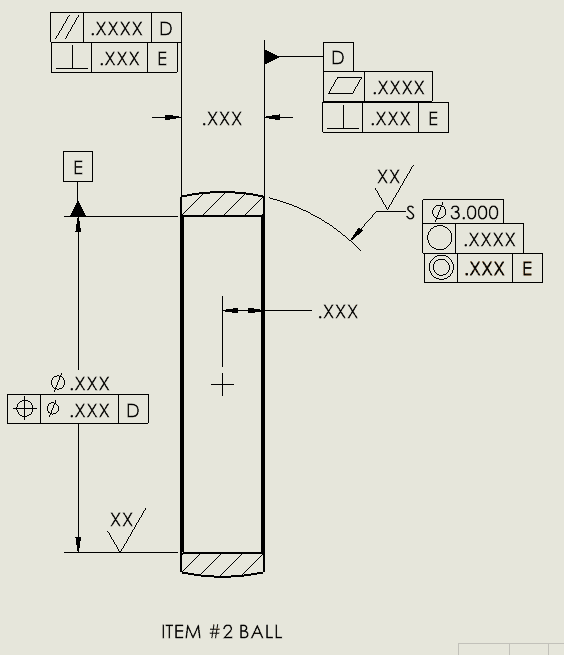
Moreover, calling TP on the ball dia does not make sense to me.
Calling two flatness on the race seem to be not needed, especially if both surfaces are controlled by perpendicularity already.
Is form control on the ball OD a good idea?
![[wink]](/data/assets/smilies/wink.gif "[wink] [wink]")