Hello everyone,
The current AISC A360-16 Spec calculates flexural strength based on plastic section properties for the most part.
If you wanted to calculate the flexural strength based on the principles of elastic distribution how would you manipulate the equations provided in chapter F2 (doubly symmetric i-shapes)to do this (A360-16)
Do you agree with the following?
1. Yielding. Mn = Mp = Fy*Sx
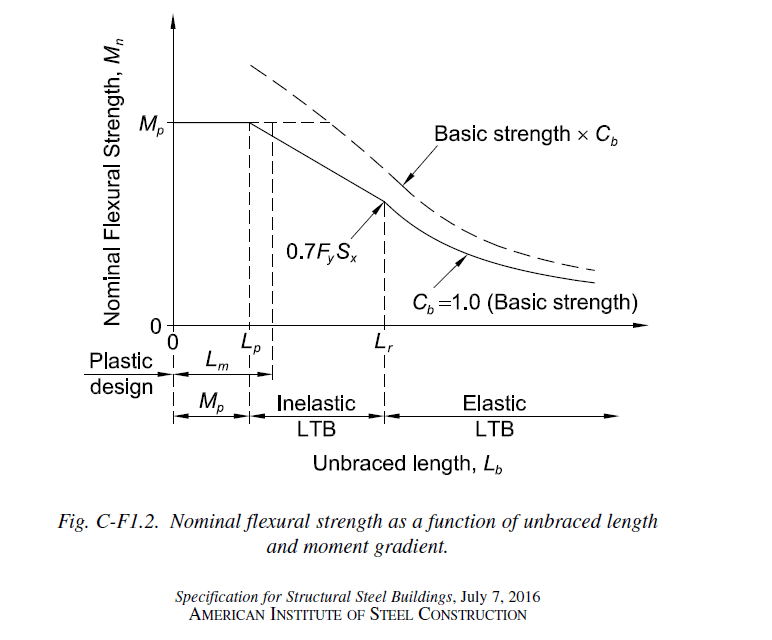
2.Lateral torsional buckling.
Lp<Lb<Lr (inelastic buckling)
Mn = cb[Fy*Sx - (0.3 FySx)*((Lb-Lp)/(Lr-Lp))]< Fy*Sx (similar to provisions in chapter F5)
Lb>Lr (elastic buckling)
no changes.
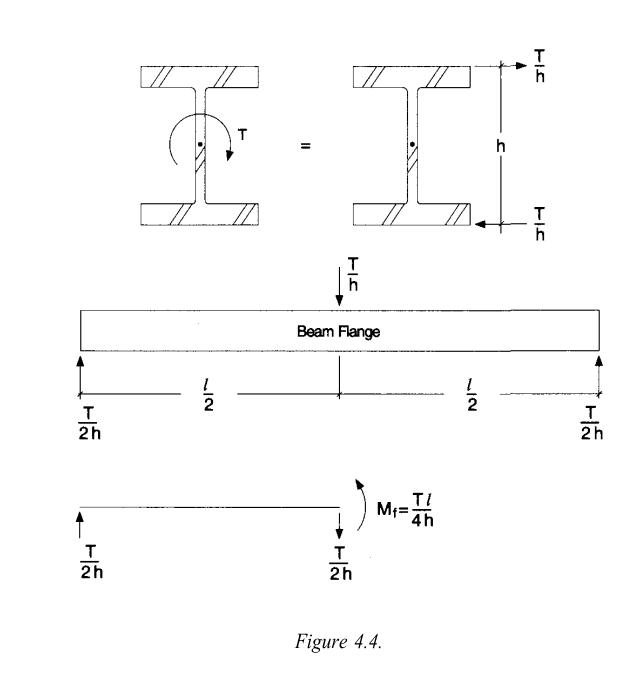
The reason why I am curious is because, the code recommends using elastic distribution when combining flexure and torsion.
The current AISC A360-16 Spec calculates flexural strength based on plastic section properties for the most part.
If you wanted to calculate the flexural strength based on the principles of elastic distribution how would you manipulate the equations provided in chapter F2 (doubly symmetric i-shapes)to do this (A360-16)
Do you agree with the following?
1. Yielding. Mn = Mp = Fy*Sx
2.Lateral torsional buckling.
Lp<Lb<Lr (inelastic buckling)
Mn = cb[Fy*Sx - (0.3 FySx)*((Lb-Lp)/(Lr-Lp))]< Fy*Sx (similar to provisions in chapter F5)
Lb>Lr (elastic buckling)
no changes.
The reason why I am curious is because, the code recommends using elastic distribution when combining flexure and torsion.