sendithard
Industrial
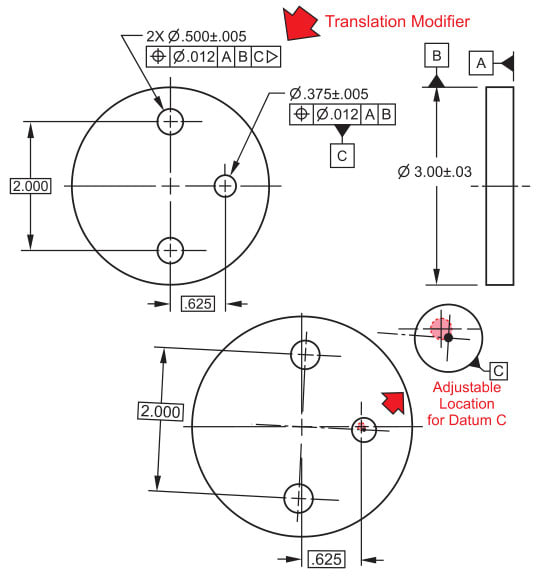
I didn't understand the translation modifier until I simply watched Don Day's tec ease video on it recently:
Makes sense that a datum fixed by a basic dimension could not be properly located to the actual feature location so shit could not be stable.
My question is b/c you are placing this modifier after its own Datum Symbol if the Datum location was spelled out with Basic dimensions in both X and Y locations(and not a centerline like Don's video), I assume this could translate in both directions...and AS much as possible, potentially not adhering to an engineers idea when they place a basic in two directions. Either my idea of how wrong this could go is indeed wrong...or the engineer understands what they are doing with this modifier...this is a modifier I'd be happy to not ever use....unless I could tolerance the modifier itself, which is quite odd.
Just looking for some discourse on this odd section in the standard, thanks as always.
Makes sense that a datum fixed by a basic dimension could not be properly located to the actual feature location so shit could not be stable.
My question is b/c you are placing this modifier after its own Datum Symbol if the Datum location was spelled out with Basic dimensions in both X and Y locations(and not a centerline like Don's video), I assume this could translate in both directions...and AS much as possible, potentially not adhering to an engineers idea when they place a basic in two directions. Either my idea of how wrong this could go is indeed wrong...or the engineer understands what they are doing with this modifier...this is a modifier I'd be happy to not ever use....unless I could tolerance the modifier itself, which is quite odd.
Just looking for some discourse on this odd section in the standard, thanks as always.