"According to data obtained from the self-driving system, the system first registered radar and LIDAR
observations of the pedestrian about 6 seconds before impact, when the vehicle was traveling at 43 mph.
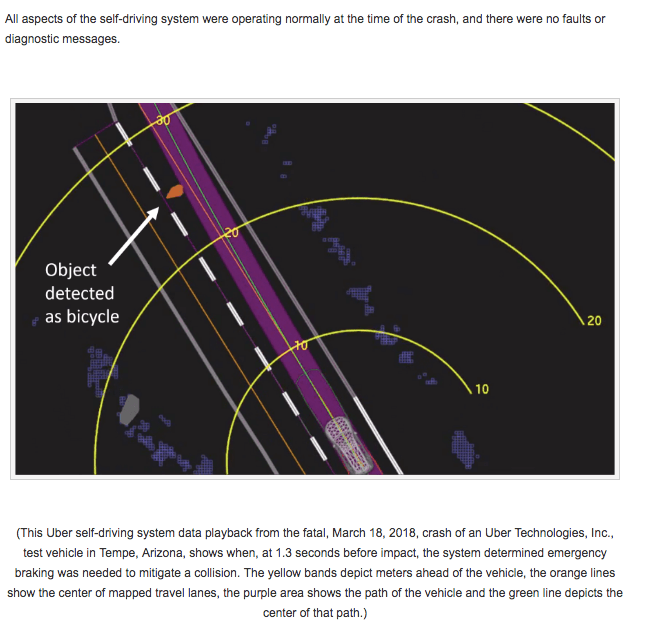
As the vehicle and pedestrian paths converged, the self-driving system software classified the pedestrian
as an unknown object, as a vehicle, and then as a bicycle with varying expectations of future travel path.
At 1.3 seconds before impact, the self-driving system determined that an emergency braking maneuver
was needed to mitigate a collision (see figure 2).
2 According to Uber, emergency braking maneuvers are
not enabled while the vehicle is under computer control, to reduce the potential for erratic vehicle
behavior. The vehicle operator is relied on to intervene and take action. The system is not designed to
alert the operator. "
So whether it is unknown or a vehicle or bicycle, it was never something that could have been ignored.
Cheers
Greg Locock
New here? Try reading these, they might help FAQ731-376
![[evil]](/data/assets/smilies/evil.gif "[evil] [evil]")