Please see Figure 7-12(c) of 2018 version as shown below.
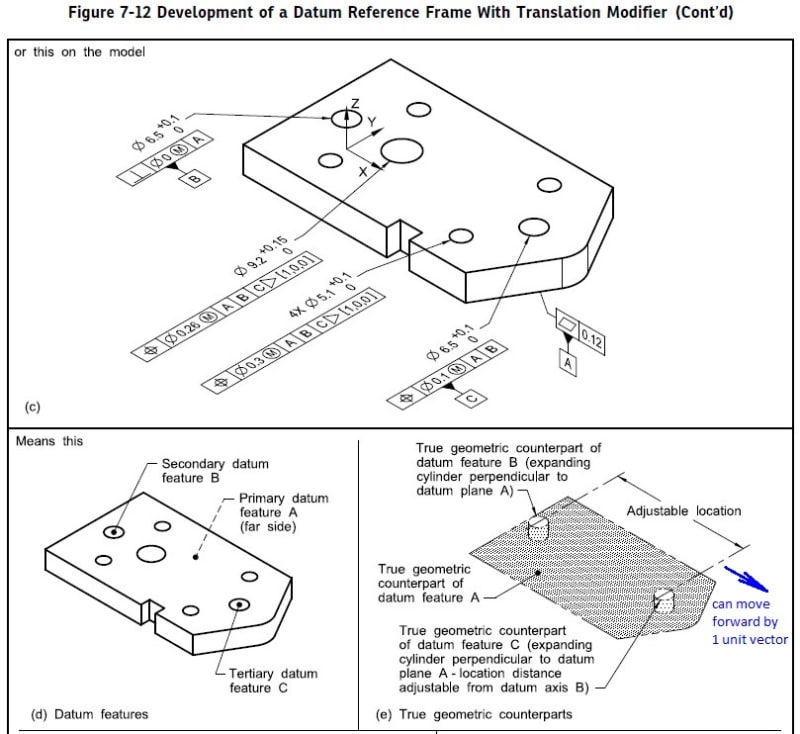
My question is : the unit vector designation [1,0,0] followed by Translation modifier means the true geometric counterpart of datum feature C can be moved by 1 unit vector on X-axis as indicated by the arrow[highlight #FCE94F](Edit: added by me)[/highlight], I can't inderstand why the translation(1) can be larger than the datum feature C position tolerance(Ø0.1).
Thanks for the help
Season
My question is : the unit vector designation [1,0,0] followed by Translation modifier means the true geometric counterpart of datum feature C can be moved by 1 unit vector on X-axis as indicated by the arrow[highlight #FCE94F](Edit: added by me)[/highlight], I can't inderstand why the translation(1) can be larger than the datum feature C position tolerance(Ø0.1).
Thanks for the help
Season